全球最大的自动驾驶出行服务商,累计向公众提供乘车服务达500万次


超一线城市全覆盖,10+城市开放载人测试运营服务
我们已将安全抵达真正落地
83%
+
自动驾驶技术公众接受度
10城
+
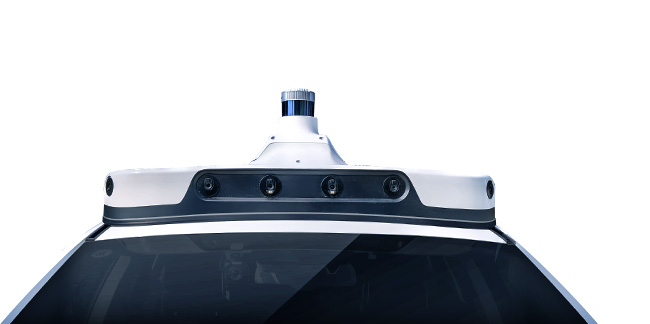
技术通用性提升
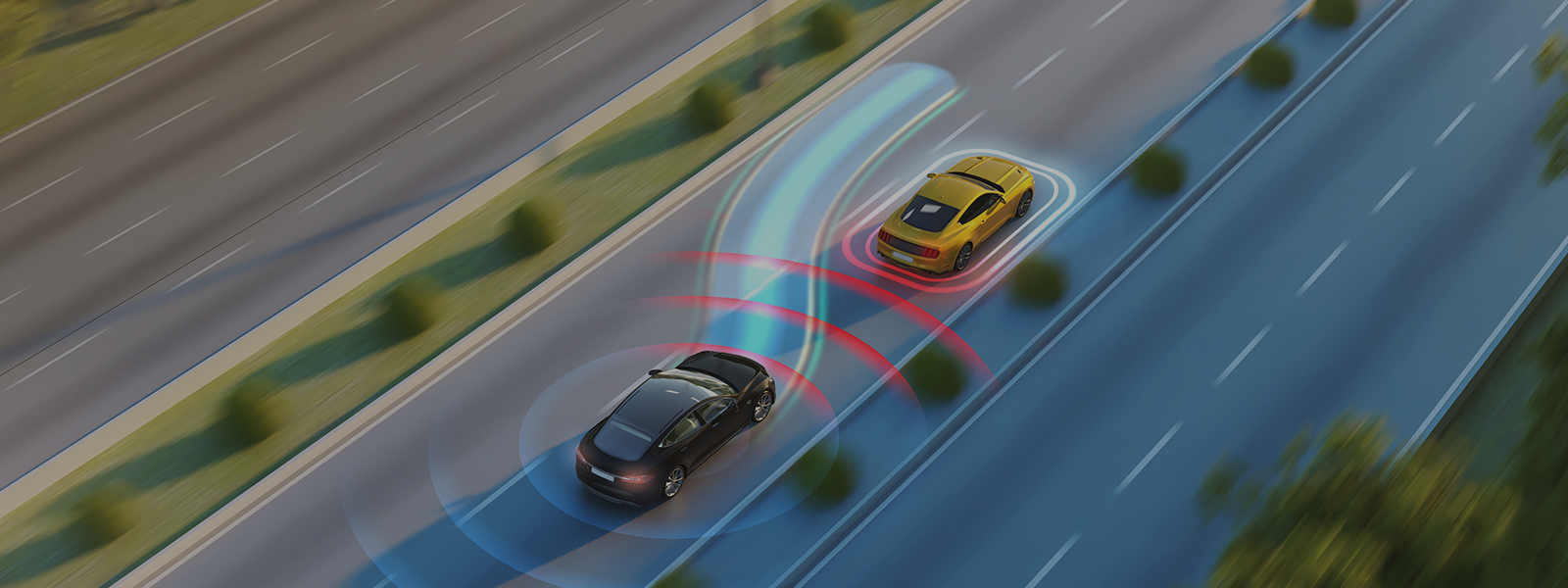
安全是自动驾驶商业化的基础。过去十年,百度Apollo 始终把“安全第一”作为发展自动驾驶的重中之重,也是自动驾驶的最终目标。当前,百度Apollo自动驾驶测试和运营总里程已经超过9000万公里,并且每天以10万公里以上速度增长,从未发生过由于自动驾驶造成人员伤亡的重大安全事故。


750,000
+
行开源代码
100,000
+
开发者
220
+
生态合作伙伴
165
+
个国家
最新资讯
截至2024年1月2日,百度萝卜快跑累计向公众提供乘车服务500万次,四季度内,萝卜快跑服务单数同比增长49%至83.9万单
开放能力 共享资源 加速创新 持续共赢










































关闭